Використання безпілотних літальних апаратів на сьогодні є достатньо затребуваним у багатьох сферах людської діяльності (про це можна почитати у минулому пості). Кожна із цих сфер потребує своєрідних підходів до підготовки безпілотника та навичок оператора. Базуючись на власному досвіді та аналізі досвіду роботи спеціалістів, я хочу висвітлити головні аспекти використання БПЛА, деталізувавши кожний етап підготовки та виконання польових робіт, з акцентом на сферу картографування, моніторингу та сільського господарства.
Вибір БПЛА
Першим та найголовнішим кроком перед початком роботи з БПЛА є саме вибір необхідного для поставлених цілей апарату. Сьогодні існує велика кількість фірм-виробників, які пропонують різноманітні модифікації даних пристроїв. Ціни варіюють від кількох тисяч до кілька сот тисяч гривень. На вартість БПЛА впливають їх характеристики, а саме: матеріал збірки (пластик, карбон), час роботи в режимі польоту (ємність акумуляторів), дистанція роботи квадрокоптера від оператора (потужність радіозв’язку), камери (звичайні оптичні фотокамери, NIR-камери), об’єм внутрішньої пам’яті (можна збільшити, придбавши додаткові карти пам’яті), точність бортового GPS, можливість автоматичного маршрутизованого знімання, температурний діапазон роботи тощо. В більшості випадків саме можливості камер визначають напрям сфери використання дронів в картографуванні та сільському господарстві.
Сьогодні також розвинутий ринок комплектуючих для самостійної конструкції безпілотників, що значно зменшує його вартість, відкидаючи послуги спеціалістів з даного питання, при умові, якщо є досвід виконання таких робіт.
Підготовка периферійних комплектуючих
Після етапу вибору БПЛА, який задовольняє поставленим цілям, важливим кроком є підготовка периферійних комплектуючих, які значно спростять та оптимізують польові роботи.

По-перше, необхідний рюкзак або кейс для транспортування, який, як правило, можна замовити у виробника обраного квадрокоптера, або змайструвати самому. Преваги спеціального рюкзака в матеріалах, з яких він зроблений (як правило це вологостійка тканина), та органайзерські відсіки для комплектуючих БПЛА, які допомагають зберегти їх цілісність та неушкодженість при зберіганні та транспортуванні.

По-друге, необхідно «запастись» додатковими акумуляторами, адже, як правило, в середньому однієї батареї вистачає на 20-25 хвилин польоту, що у більшості випадків не дозволяє виконати поставлені задачі. Також, окрім додаткових елементів живлення, бажано мати кабель для можливості підзарядки від прикурювача автомобіля, а в ідеалі – портативний електрогенератор (для тривалих виїзних польових робіт). Як правило, зарядні пристрої для акумуляторів мають вихід для зарядки лише однієї батареї, тому, для економії часу (зарядка одного акумулятора в середньому до 2-х годин), не зайвим буде придбання спеціального модуля, який дає змогу заряджати декілька акумуляторів.

По-третє, необхідно додатково придбати запасні лопаті (пропелери) на випадок ушкодження основних при транспортуванні, падінні тощо. Слід зазначити, що більшість пропелерів виготовлені з пластику чи вуглепластику і при можливій невдалій посадці БПЛА, при роботі на низьких температурах повітря, при контакті зі сніговим покривом вони просто «розсипаються». Додатково можна придбати і захисні бампери на пропелери, які захищатимуть оточуючих людей від контакту з ними та збережуть лопаті при можливому потраплянні на листя чи гілля дерев тощо.

Четвертий і, як на мене, один з найголовніших кроків підготовки – це вибір супроводжуючого польоти гаджету: планшету чи смартфону. Керування більшості коптерів відбувається саме через iOS, Android чи Windows пристрої. Як правило, сьогодні кожна людина має смартфон, та використовує саме свій пристрій, як «центр керування польотом». Основні вимоги до гаджету такі:
- роздільна здатність екрану. Як кажуть «чим більше, тим краще», проте не завжди великий екран є зручним. Тут при виборі необхідний індивідуальний підхід;
- тип матриці передачі кольорів. Так як всі польові роботи коптером виконуються на відкритій місцевості при ясній погоді, то дуже важливим є сприйняття видимої картинки, яка на низці дисплейних матриць просто марніє, зменшуючи яскравість та якість зображення, що може стати причиною зіткнення БПЛА з певними об’єктами;
- ємність акумулятора. При постійній роботі екрану на максимальній яскравості та зв’язку WiFi, як правило, батарея дуже швидко розряджається, тому треба враховувати даний фактор і, як допоміжний засіб, мати додатковий акумулятор для гаджету, або зовнішній елемент живлення Power Bank;
- системні характеристики. Гаджет має підтримувати можливість завантаження спеціального сучасного програмного забезпечення для керування польотами, мати GPS, WiFi модулі та системи зв’язку високошвидкісного мобільного Інтернету, достатню кількість внутрішньої пам’яті для завантаження карт-підкладинок.
При використанні смартфону в якості монітору керування дроном бажано використовувати окрему sim-карту або окремий, призначений для польотів гаджет. Дана порада заснована на тому, що під час виконання польотів, на ваш телефон можуть невчасно подзвонити, що може привести до збоїв у роботі програмного забезпечення, що в свою чергу може дещо дезорієнтувати оператора, особливо малодосвідченого, та призвести до негативних наслідків – втрата керування, пошкодження інфраструктури, падіння безпілотника, травмування людей тощо. Також на супроводжуючому гаджеті необхідно відключити функцію автоматичного підключення до джерела WiFi, адже його можливе переключення від дрону до іншого стаціонарного роутера, що призведе до можливої втрати контролю та аварійної ситуації.

Ще одним необов’язковим, проте дуже корисним є наявність невеличкого GPS-трекера, який легко можна закріпити на дроні. Основне завдання даного пристрою – легкий пошук безпілотника на поверхні землі, особливо в заростях рослинності при падінні апарату.
Програмне забезпечення
Після підготовки технічної складової до організації польотів, наступним кроком є вибір належного програмного забезпечення для керування дроном, планування та складання маршрутів в режимі автопілоту. Як правило, виробники квадрокоптерів надають можливість безкоштовно завантажити спеціальні додатки для керування своїми пристроями.
На практиці ми використовували дрони компанії DJI – «Phanom 2 Vision+» та «Phanom 3». Фірма-розробник даних коптерів пропонує додатки «DJI Vision» та «DJI GO». Дані додатки підтримують всю лінійку коптерів DJI та забезпечують їх налаштування, калібрування навігаційних пристроїв, візуалізацію зображення з камери дрона на екран гаджету при пульті керування, дозволяє керувати положенням камери під час польотів, показує основні параметри польоту: висота, швидкість, кількість супутників від яких отримується сигнал, рівень заряду батареї як квадрокоптера, так і WiFi-роутера, об’єм вільної пам’яті для збереження даних тощо. Дані програмні продукти є основними та ключовими при навчанні роботи з дронами та при подальшому їх використанні.

Скріншот з додатку «DJI Vision»
В той же час є програмні продукти, які було розроблено спеціально для складання маршрутних польотів для заданої площі в режимі автопілоту. На сьогодні флагманськими додатками в цьому напрямку є «DroneDeploy» і «Pix4D Capture», які також підтримують роботу з дронами усіх виробників. Використовуючи картографічну підкладку дані програмні засоби дозволяють позначити територію, яку необхідно відзняти, задати висоту та швидкість польоту, відсоток поздовжнього та поперечного перекриття фотознімків, запустити політ в режимі автопілоту. В той же час, в цих же додатках, як і в програмних засобах «DJI Vision» та «DJI GO», можна відстежувати і показники «життя» апарату, окрім так званої функції «телеметрії», тобто ми не зможемо бачити зображення з камери.
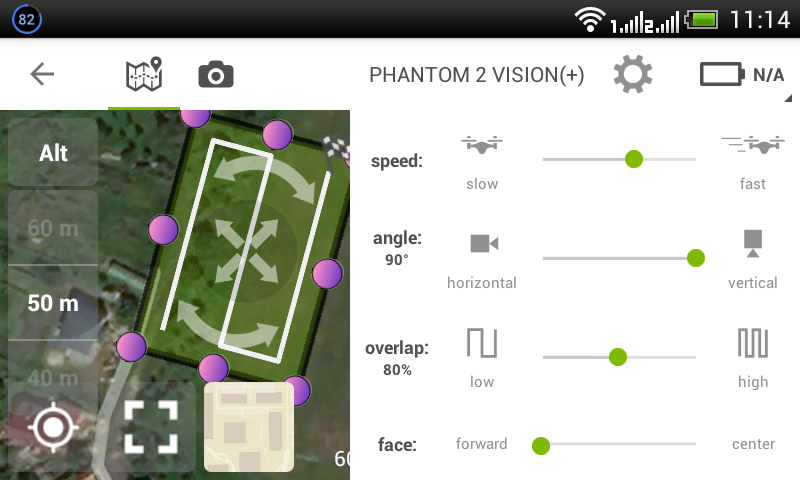
Скріншот з додатку «Pix4D Capture»
Пробні польоти
Після того, як комплект устаткування та програмне забезпечення для роботи з БПЛА готові, можна переходи безпосередньо до пробних польотів, для того щоб мати елементарні навички керування дроном. Як правило, в інструкціях з експлуатації наводиться низка тренувальних вправ, якими не варто нехтувати. Перші заняття рекомендовано проводити на відкритій місцевості за відсутності таких перешкод як висока рослинність, дерева, лінії електромереж тощо, та за відсутності скупчення людей. Окрім отримання навичок керування квадрокоптером в ручному режимі, слід зробити декілька польотів за заданими маршрутами в режимі автопілоту. Як показує практика, при роботі з автопілотом при навчанні дуже корисними є виникнення нештатних ситуацій – коли дрон не слідує заданому маршруту та намагається «полетіти». В таких випадках треба негайно вмикати режим ручного керування і направляти його до пункту старту вручну. Дані навички позбавлять оператора від стресу в майбутньому при виникненні збоїв у роботі автопілоту. На практиці такі випадки трапляються один на дев’ять-десять польотів (використовували дрони DJI «Phanom 2 Vision+» та «Phanom 3», смартфони HTC, Samsung, Lenovo, Meizu). Дуже складно встановити їх причину, адже експериментально використовувались різні комбінації дрон+гаджет.

До початку польових робіт
При отриманні навичок керування та підготовленості до польових робіт, перш ніж вирушити на ці роботи, необхідно максимально зарядити пульт керування, всі акумулятори квадрокоптера і супроводжуючого гаджету. Окрім цього, бажано провести так звану «камеральну рекогносцировку» місцевості, тобто за допомогою он-лайн карт та космічних знімків детально вивчити місцевість, на якій планується проводити польоти. Необхідно вивчити територію на наявність висотних перешкод: дерева, лінії електромереж тощо. Також, бажано завантажити в кеш-пам’ять територію об’єкту, що знімається, адже дуже часто буває недостатньо якісний мобільний зв’язок в окремих місцевостях. До початку відрядження можна спланувати маршрути польотів, побудувавши їх у програмі-додатку, вирахувати їх загальну кількість та визначити оптимальну точку для старту. Під час польотів бажано, щоб оператор знаходився в центрі площинного маршруту, якщо це дрон з невеликим радіусом дії радіосигналу, то пульт керування завжди повинен бути направлений в бік літального апарату.
Також бажано в налаштуваннях виставити місце зберігання фото-відео матеріалів на карту пам’яті безпілотника, а не в пам’ять гаджету. Це зменшить певне навантаження на пульт керування, що знизить ризик збоїв у роботі, збільшить час роботи акумуляторів БПЛА, пульту керування та гаджету і пришвидчить процес зберігання даних.
До підготовчих передвиїздних завдань також можна віднести і оцінку метеорологічної ситуації на об’єкті. Найбільш сприятлива – тепла, ясна безвітряна погода, адже при пониженні температури або поривах вітру автономний час роботи БПЛА значно знижується, а інколи ці фактори призводять до падіння апарату. Як правило, температурні режими роботи дронів наведено у керівництвах користувача. Слід зазначити і важливість обраного часу проведення фотознімання: якщо зйомка, наприклад, сільськогосподарського поля виконується на звичайну оптичну камеру, то бажано, щоб були відсутні тіні від лісосмуг, хмар та інших об’єктів; при зніманні ярів, яружно-балкових систем тощо, необхідно планувати час польотів таким чином, щоб сонячне світло падало на експозицію схилу, не створюючи тіней всередині яру. Ефект тіні, при роботі зі звичайною камерою, створює нерівномірне освітлення об’єкту, що впливає на якість передачі кольорів та може негативно вплинути на результати обробки, аналіз отриманих даних, та оцінку їх результату.
Старт
До опису БПЛА завжди додаються їх характеристики до супротиву вітру, проте, як засвідчує практика, найбільш небезпечним є підйом апарата при наявності вітру, навіть незначного. Тому необхідно для старту обирати менш підвітряну місцевість, наприклад в п’яти-семи метрах від лісосмуг, якщо це неможливо, то квадрокоптер необхідно піднімати різким рухом до висоти 2-2.5 м, припинити підйом, та стабілізувати його.
Після вибору точки старту і підготовки коптера до польоту, необхідно упевнитися в тому, що всі захисні фіксатори знято чи відкріплено, це, насамперед, стосується камери. В першу чергу включається пульт керування, потім – сам БПЛА. При складанні маршруту в спеціальних програмних засобах-додатках також вказується орієнтовний час виконання польоту, та видається інформаційне повідомлення: чи може бути виконана ця зйомка, враховуючи ресурс акумулятора. Проте даний час приблизний і припускає, що виконуватися зйомка буде при ідеальних умовах, тому, як правило, до вказаного часу необхідно накидувати додаткові 3-4 хв.

Політ та його результати
При виконанні зйомки за допомогою функції автопілоту необхідно бути готовим до переходу на ручне управління. Як правило, дуже важко зорієнтуватися з вибором висоти при виконанні зйомки яружно-балкових систем, зважаючи на рослинність. Слід пам’ятати, що при виникненні збоїв і поверненні БПЛА в точку старту, він буде рухатись по прямій лінії, без можливості оминати перешкоди. Під час польоту дрону оператор має завжди зберігати його в полі зору.
По закінчені виконання зйомки за заданим маршрутом бажано переходити до ручного управління безпілотніком для здійснення посадки апарату. Враховуючи сукупність можливих дрібних нерівностей, в польових умовах бажано саджати апарат на низькій швидкості «в руку» оператора чи помічника, попередньо потренувавшись у виконанні даного маневру, який для новачків є досить небезпечним.
Якщо за один виїзд виконується декілька маршрутних знімань, то бажано розділити їх якимось «випадковим фото», адже при опрацюванні знімків однорідних полів, маючи великий масив фотоматеріалів, іноді дуже важко розділити ці маршрути між собою.
Завантаження отриманих даних на комп’ютер здебільшого відбувається двома шляхами: через USB-кабель або безпосередньо з карти пам’яті. Якщо це перший варіант, то перед включенням БПЛА для цієї процедури необхідно зняти фіксатори камери. При фіксуванні камери та включенні дрона камера «оживає» і обмеженість її рухів впливає на калібрування та якість роботи в майбутньому.
Чим завершити?.. Наразі ведуться експериментальні польоти, пов’язані з визначенням точності фотознімання різними БПЛА, використовуючи різні технічні параметри та критерії. Тож – далі буде… 
У пості використано іконки andriwidodo, Kidiladon, Sriramteja SRT, Setyo Ari Wibowo, arejoenah, ліцензія CC BY 3.0