Цей пост є вже третім постом із серії про методи автоматизованого пошуку змін по космічних знімках. Обидва минулих пости розповідали про різні способи порівняння безпосередньо різночасових знімків. Але можна замість цього порівнювати карти класифікації, які створені окремо для кожного знімка. Загальна схема пошуку змін за допомогою порівняння різночасових карт класифікації наведена на рисунку 1.
Теорія
На першому етапі виконують класифікацію знімків та післякласифікаційну обробку. Для кожної дати можна використати однаковий алгоритм класифікації з однаковими налаштуваннями. А можна для кожної дати завдавати свої налаштування. Також можна використати різни алгоритми класифікації для знімків за різні дати. Головне при цьому забезпечити високу якість класифікації.
Після отримання карт класифікації на наступному етапі їх порівнюють та виокремлюють різни сполучення класів за першу та другу дату, а також ділянки, що не зазнали змін. Сучасне програмне забезпечення дозволяє робити це порівняння в автоматизованому режимі. Практичні аспекти цього процесу будуть описані у другій частині посту. Результати порівняння можуть бути виведені у вигляді растрового зображення або векторного шару, або у вигляді таблиці, що показує перерозподіл пікселів між класами.
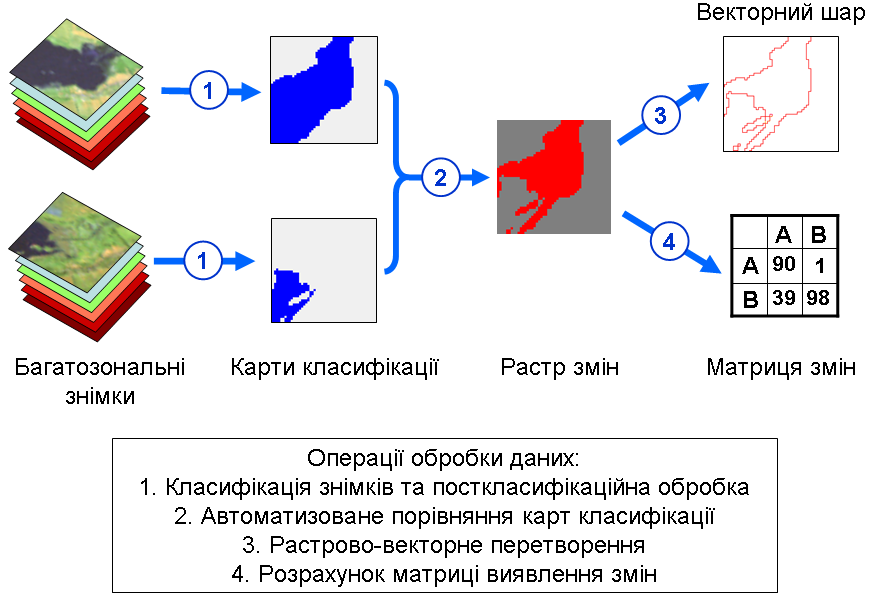
Рис. 1. Загальна схема пошуку змін за допомогою порівняння карт класифікації
Пошук змін на основі порівняння різночасових карт класифікації має одну велику перевагу – він дозволяє обійтися без радіометричного калібрування та атмосферної корекції. Ці процедури необхідні для коректного порівняння спектральної яскравості пікселів. Також вони необхідні коли ми порівнюємо кількісні показники, що розраховані на основі яскравості пікселів знімків, наприклад вегетаційні індекси. Але коли ми порівнюємо карти класифікації, ми порівнюємо не кількісні, а якісні характеристики. Саме це знімає необхідність радіометричного калібрування та атмосферної корекції.
Щоб пошук змін був ефективним, треба забезпечити виконання двох умов:
– висока точність класифікації,
– однакова точність класифікації для двох дат.
Якщо не виконується перша умова, то ми будемо мати низьку точність ідентифікації змін. Наприклад, ми не зможемо знайти зміни, тому що для двох дат не було дешифровано об’єкти, які зазнали змін. Якщо не виконується друга умова, то ми можемо помилково ідентифікувати зміни. Знайдені зміни будуть відповідати не змінам на місцевості, а помилкам класифікації.
Практика
Розберемо порівняння карт класифікації в ENVI на прикладі оцінки зміни площі Муромського водосховища. Муромське водосховище знаходиться в Харківському районі Харківської області. Воно розташоване на річки Муром та починається нижче села Веселе. Гребля водосховища стоїть в 4,5 км від впадіння Мурома в річку Харків біля села Руські Тишки.
Водосховище було створене в 1978 році з метою зрошення сільськогосподарських угідь. Також воно було одним з резервних водосховищ для забезпечення водопостачання міста Харкова. Всю історію водосховища та ландшафтів навколо його ми можемо відстежити по знімках із супутників місії Landsat, яка почалася в 1975 році. Для прикладу візьмемо два знімки зі супутника Landsat 5 (сенсор TM) за 17 травня 2000 року та 18 вересня 2007 року (рис. 2).

Рис. 2. Різночасові знімки Landsat 5 TM (комбінація каналів 7:5:3). Ліворуч – знімок за 17.05.2000, праворуч – знімок за 18.09.2007
Коли ми візуально порівнюємо знімки, то бачимо, що площа водного дзеркала зменшилася. Це може бути пов’язане з багаторічними змінами водойми. А може бути наслідком лише сезонної динаміки опадів та температури в 2007 році. Також можливо, що скорочення площі водосховища виникло внаслідок штучного спуску води з нього. Зараз ми не будемо шукати причину змін, ми зосереджуємо зусилля на картографуванні цих змін.
Кожний знімок був класифікований з виокремленням двох класів – водної поверхні та всього іншого (рис. 3). Далі на етапі післякласифікаційної обробки були відсіяні маленькі ставки й на картах класифікації залишилося саме водосховище. Розберемо автоматичне порівняння цих карт класифікації.
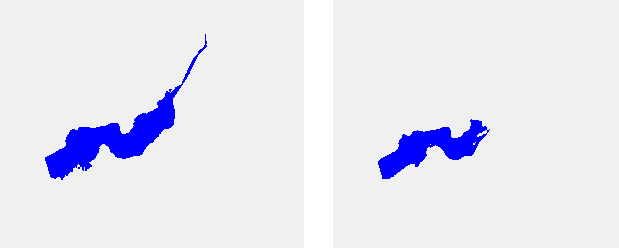
Рис. 3. Різночасові карти класифікації. Ліворуч – карта класифікації за 17.05.2000, праворуч – карта класифікації за 18.09.2007
1) Щоб запустити процедуру порівняння карт класифікації треба в Тулбоксі обрати команду Change Detection → Thematic Change Workflow (рис. 4).

Рис. 4. Інструменти для порівняння різночасових даних в Тулбоксі ENVI
З’явиться вікно майстра порівняння карт класифікації (Thematic Change). В ньому треба крок за кроком налаштовувати процедуру та натискати кнопку Next>. Процес проходить в чотири кроки:
– вибір даних для порівняння,
– налаштування легенди для карти змін,
– налаштування генералізації результатів,
– налаштування збереження результатів.
2) Інтерфейс вікна Thematic Change на першому кроці показаний на рисунку 5. Вікно має дві вкладки. На вкладці Input Files треба вказати дані, які ми порівнюємо. Для цього є два поля – Time 1 Classification Image File (зображення класифікації за першу дату) та Time 2 Classification Image File (зображення класифікації за другу дату). Щоб знайти необхідні дані, треба натиснути кнопку Browse… праворуч від відповідного поля. На другій вкладці (Input Mask) можна вказати маску обробки. Це не є обов’язковим. За замовчуванням порівняння карт класифікацій виконується без маски.

Рис. 5. Перший крок порівняння різночасових карт класифікації – вибір даних
3) На другому кроці треба налаштувати легенду карти змін. Робиться це за допомогою вимикача Only Include Areas That Have Changed («включати лише ділянки, що мають зміни»). Якщо поставити галочку для цього вимикача, то в карті змін для кожного варіанту переходу між класами буде окремий колір. А всі пікселі, що не зазнали змін, будуть позначені одним кольором незалежно від класу, до якого вони належать. Якщо не ставити галочку в цій вкладці, то також в карті змін для кожного варіанту переходу між класами буде окремий колір. Але для пікселів, що не зазнали змін, будуть мати різні кольори, в залежності від класу, до якого вони належать. В нашому прикладі використовується саме цей варіант (рис. 6).
Після виконання другого кроку в таблиці змісту з’являється карта змін. Але поки що це ще не є результат. Це лише тимчасове зображення для попереднього перегляду. Якщо це зображення не відповідає вашим потребам, можна натиснути кнопку <Back та змінити налаштування попереднього кроку.
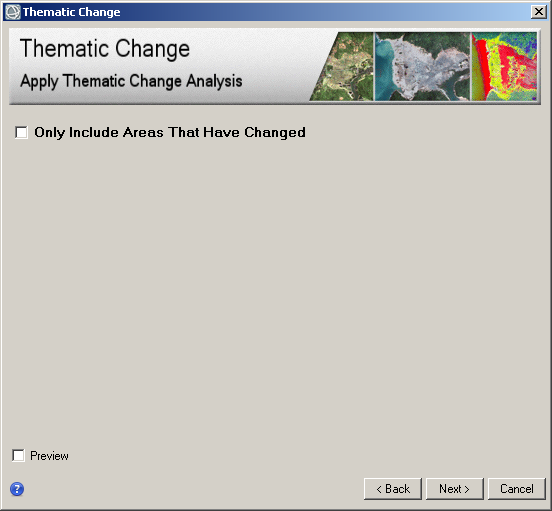 Рис. 6. Другий крок порівняння різночасових карт класифікації – налаштування легенди для карти змін
Рис. 6. Другий крок порівняння різночасових карт класифікації – налаштування легенди для карти змін
4) На третьому кроці можна завдати генералізування результатів. Програма пропонує два способи генералізування – згладжування та агрегування. Згладжування спрощує межі на карті змін. Агрегування прабарає з карти змін дрібні ареали.
Можна використати обидва способи, один з двох способів або не використати жодний. Приклад останнього варіанту можна бачити на рисунку 7. Для обрання способу треба поставити галочку в відповідному вимикачі. Для згладжування – Enable Smoothing, для агрегування – Enable Aggregation. Ступінь генералізації можна налаштувати за допомогою числового значення в відповідному рядку вводу.

Рис. 7. Налаштування параметрів генералізування карти змін
5) Інтерфейс вікна Thematic Change на четвертому кроці показаний на рисунку 8. Тут у двох вкладках містяться опції збереження результатів. Перша вкладка (Export Files) містить опції збереження результатів у графічному вигляді. Карту змін можна зберегти у растровому форматі та в векторному форматі. Растрові дані зберігаються в форматі растрів ENVI з розширенням img. Векторні дані зберігаються в форматі шейп-файлу. В таблиці атрибутів його створюються три поля – клас за першу дату, клас за другу дату та площа в квадратних метрах.
Друга вкладка (Export Statistic) дозволяє зберегти в форматі txt таблицю, яка показує перерозподіл пікселів між класами. Цю таблицю також називають матрицею виявлення змін (change detection matrix). Вона має стільки рядків, скільки є можливих сполучень класів за першу та другу дату. Стовпчиків у таблиці чотири: клас за першу дату, клас за другу дату, площа у квадратних метрах та доля від загальної площі в відсотках. Зробивши налаштування на четвертому кроці, можна натиснути кнопку Finish.
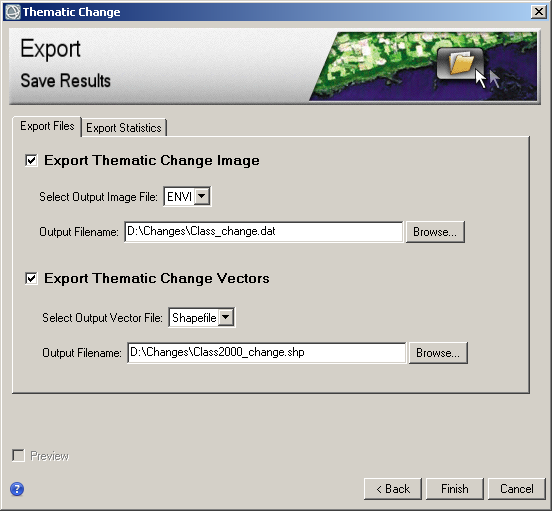
Рис. 8. Четвертий крок порівняння різночасових карт класифікації – налаштування збереження результатів
6) Результати автоматизованого пошуку змін показані на рисунку 9. Незмінна площа водного дзеркала на карті змін має синій колір, незмінна площа інших об’єктів – сірий колір. Пікселі, що перестали належати до класу водної поверхні позначені зеленим кольором. Пікселі, яки перейшли до класу водної поверхні, позначені червоним кольором.
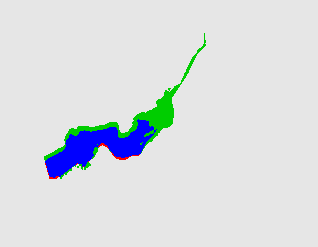

Рис. 9. Карта змін та таблиця змін, імпортована з текстового файлу до Exel
З таблиці змін (рис. 9, праворуч) ми можемо зробити кількісні оцінки змін. За нормального опорного рівня (згідно з проектною документацією) площа водосховища має бути 4,08 км2. За даними дешифрування космічних знімків водосховище мало площу 3,83 км2 у 2000 році та 2,28 км2 у 2007 році. За другу дату площа менш ніж за першу на 40%.